Research.
I am largely interested in mathematical questions of a dynamical nature, e.g., in the context of algorithm design, control systems and synthetic biology. In particular, I like to understand the interplay between the underlying problem structure and achievable qualitative behaviour. We typically study these questions by means of appropriate topological invariants.

Projects.
Programmbility of Cells
 2 year personal grant from Digital Futures (2.4 MSEK)
2 year personal grant from Digital Futures (2.4 MSEK)
with Prof. KH Johansson (Department of Decision and Control Systems, KTH) and Prof. M Scolamiero (Department of Mathematics, KTH)
Digital Futures page
Objective: The aim of the project is to develop control theoretic tools that can handle coarse models. In particular, coarse models as typically found in synthetic biology. Mathematically, we capture ‘coarseness’ through topological dynamical systems theory and aim to provide control theoretic counterparts to well-established index theories. Developing the theory is a first step, a second step is to integrate these tools directly into data-driven pipelines.
Background: Several pressing biological questions of today have a strong control-theoretic component, e.g., we do not only want to describe a cancerous cell, we want to prescribe its dynamics. Compared to classical fields of engineering, biology usually lacks the type of models that contemporary control theory can handle well. Instead, biological models are typically coarse and largely qualitative. In this project we accept this coarseness, take a topological viewpoint and develop control theoretic tools at precisely this level of granularity. We focus in particular on genetic regulatory networks that can or should generate oscillations. This, because of the large practical and theoretical appeal.
Selected (pre)prints.
[p2] On topological properties of closed attractors
 Wouter Jongeneel
Wouter Jongeneel
To be submitted 2025.
arXiv
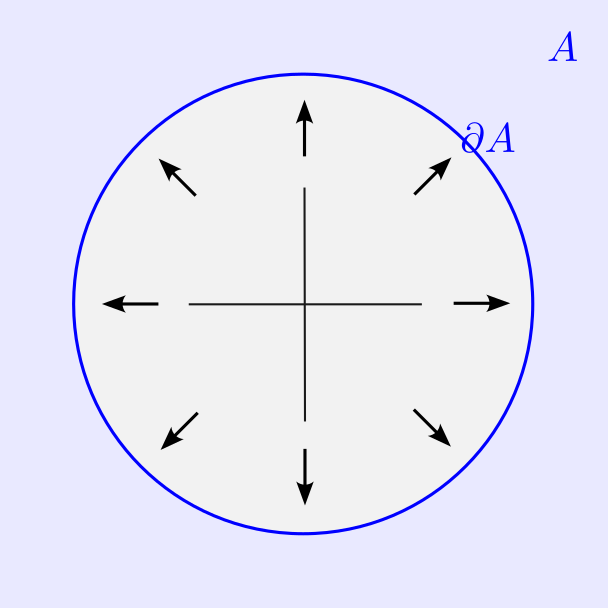
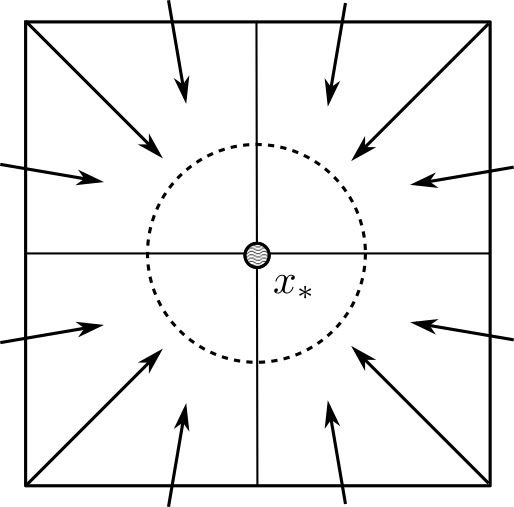
This work is the continuation of [C3], in particular, the abstract reads as: ``The notion of an attractor has various definitions in the theory of dynamical systems. Under compactness assumptions, several of those definitions coincide and the theory is rather complete. However, without compactness, the picture becomes blurry. To improve our understanding, we characterize in this work when a closed, not necessarily compact, asymptotically stable attractor on a locally compact metric space is homotopy equivalent to its domain of attraction. This enables a further structural study of the corresponding feedback stabilization problem.''
Books.
[B1] Topological Obstructions to Stability and Stabilization: History, Recent Advances and Open Problems
 Wouter Jongeneel and Emmanuel Moulay
Wouter Jongeneel and Emmanuel Moulay
SpringerBriefs in Control, Automation and Robotics (Open Access), pp. X, 132, 2023.
PDF available here, Springer website, supported by the SNSF
About this book (text by Springer): This open access book provides a unified overview of topological obstructions to the stability and stabilization of dynamical systems defined on manifolds and an overview that is self-contained and accessible to the control-oriented graduate student ...
. The authors review the interplay between the topology of an attractor, its domain of attraction, and the underlying manifold that is supposed to contain these sets. They present some proofs of known results in order to highlight assumptions and to develop extensions, and they provide new results showcasing the most effective methods to cope with these obstructions to stability and stabilization. Moreover, the book shows how Borsuk’s retraction theory and the index-theoretic methodology of Krasnosel’skii and Zabreiko underlie a large fraction of currently known results. This point of view reveals important open problems, and for that reason, this book is of interest to any researcher in control, dynamical systems, topology, or related fields.
Journal papers.
[J5] Asymptotic stability equals exponential stability—while you twist your eyes
 Wouter Jongeneel
Wouter Jongeneel
Systems & Control Letters vol. 208, pp. 106324, 2026. (Open Access)
link (Elsevier), arXiv, bibtex, invex to convex GIF, South Pole attractor GIF
Charles Conley himself posed the following ``converse question'' in the late 1970s: ``To what extent does the homotopy index itself determine the equivalence class of isolated invariant sets which are related by continuation?'' [p. 83, Con78]. This question, as revitalized by Matthew Kvalheim [Kva23], inspired our work ....
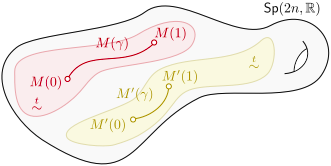
Specifically, the abstract of our work reads as: ``Suppose that two vector fields on a smooth manifold render some equilibrium point globally asymptotically stable (GAS). We show that there exists a homotopy between the corresponding semiflows such that this point remains GAS along this homotopy.''
[J4] Small errors in random zeroth-order optimization are imaginary
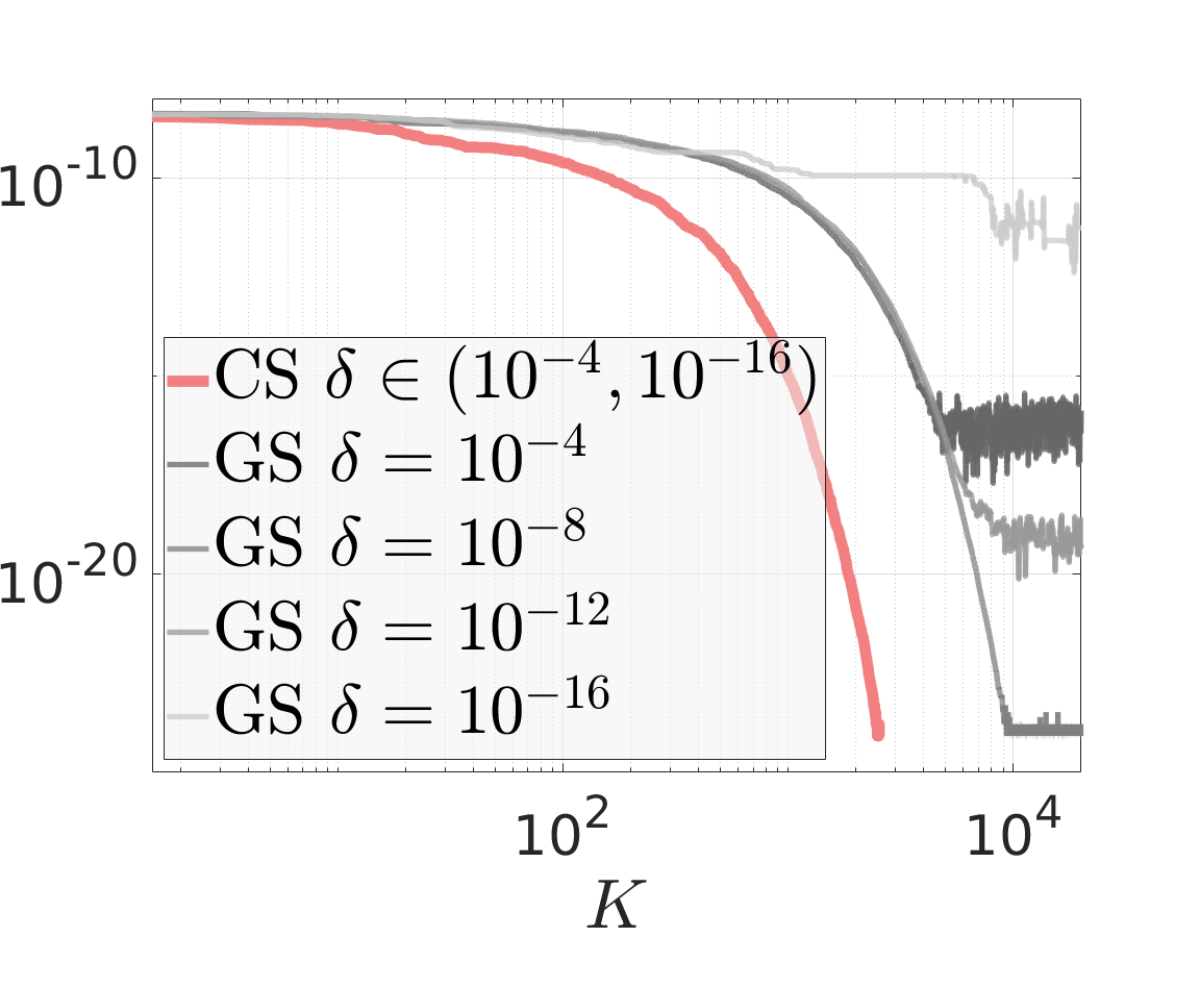 Wouter Jongeneel, Man-Chung Yue and Daniel Kuhn
Wouter Jongeneel, Man-Chung Yue and Daniel Kuhn
SIAM Journal on Optimization (SIOPT), vol. 34, no. 3, pp. 2638 - 2670, 2024.
PDF, arXiv, link (SIAM), bibtex, Lorenz GIF
*Winner of the 2023 INFORMS Optimization Society Student Paper Prize (slides).
[J3] On continuation and convex Lyapunov functions
 Wouter Jongeneel and Roland Schwan
Wouter Jongeneel and Roland Schwan
IEEE Transactions on Automatic Control (TAC), vol. 69, no. 10, pp. 6895 - 6906, 2024.
PDF, arXiv, link (IEEE), bibtex, Bifurcation GIF
[J2] Efficient Learning of a Linear Dynamical System with Stability Guarantees
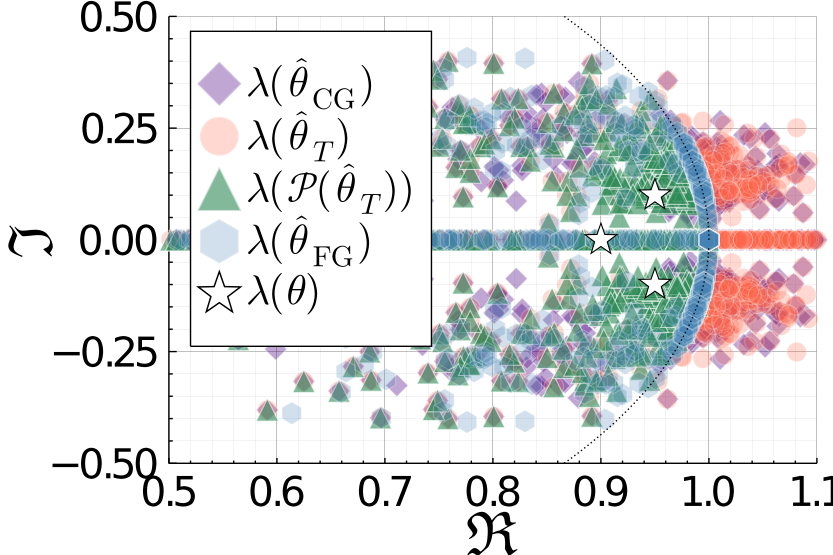 Wouter Jongeneel, Tobias Sutter and Daniel Kuhn
Wouter Jongeneel, Tobias Sutter and Daniel Kuhn
IEEE Transactions on Automatic Control (TAC), vol. 68, no. 5, pp. 2790 - 2804, 2023.
arXiv, link (IEEE), bibtex
As presented at the SIAM Conference on Optimization 2023 (slides). *Runner up IEEE CSS Swiss Chapter Young Author Best Journal Paper Award 2023, part of the TAC special issue on Learning and Control.
[J1] Topological Linear System Identification via Moderate Deviations Theory
 Wouter Jongeneel, Tobias Sutter and Daniel Kuhn
Wouter Jongeneel, Tobias Sutter and Daniel Kuhn
IEEE Control Systems Letters, vol. 6, pp. 307-312, 2022.
arXiv, link (IEEE), bibtex
Presented at the 2021 CDC.
Peer-reviewed conference proceedings.
[C6] A generalized global Hartman-Grobman theorem for asymptotically stable semiflows
 Wouter Jongeneel
Wouter Jongeneel
European Control Conference (ECC), 2026 (accepted, to appear).
PDF, arXiv
The abstract reads as: ``Recently, Kvalheim and Sontag provided a generalized global Hartman-Grobman theorem for equilibria under asymptotically stable continuous vector fields. By leveraging topological properties of Lyapunov functions, their theorem works without assuming hyperbolicity [KS25]. We extend their theorem to a class of possibly discontinuous vector fields, in particular, to vector fields generating asymptotically stable semiflows.''
[C5] Ordering and refining path-complete Lyapunov functions through composition lifts
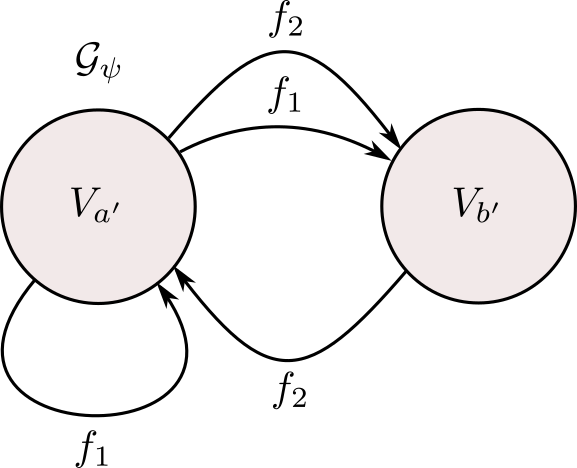 Wouter Jongeneel and Raphaël M. Jungers
Wouter Jongeneel and Raphaël M. Jungers
IEEE Conference on Decision and Control (CDC), pp. 8304 - 8309, 2025.
arXiv, link (IEEE),
In this note, we close Conjecture 8.20, as posed in the wonderful thesis by Debauche.
[C4] A Large Deviations Perspective on Policy Gradient Algorithms
 Wouter Jongeneel, Daniel Kuhn and Mengmeng Li (alphabetic)
Wouter Jongeneel, Daniel Kuhn and Mengmeng Li (alphabetic)
Proceedings of the 6th Annual Learning for Dynamics & Control Conference (L4DC), PMLR vol. 242, pp. 916 - 928, 2024.
arXiv, link (PLMR), bibtex
[C3] On topological properties of compact attractors on Hausdorff spaces
 Wouter Jongeneel
Wouter Jongeneel
European Control Conference (ECC), pp. 186 - 191, 2024.
PDF, arXiv, link (IEEE), bibtex
[C2] On Topological Equivalence in Linear Quadratic Optimal Control
 Wouter Jongeneel and Daniel Kuhn
Wouter Jongeneel and Daniel Kuhn
European Control Conference (ECC), pp. 2002 - 2007, 2021.
PDF, link (IEEE), bibtex
[C1] Robust Linear Quadratic Regulator: Exact Tractable Reformulation
 Wouter Jongeneel, Tyler Summers and Peyman Mohajerin Esfahani
Wouter Jongeneel, Tyler Summers and Peyman Mohajerin Esfahani
IEEE Conference on Decision and Control (CDC), pp. 6742 - 6747, 2019.
PDF, link (IEEE), bibtex
Preprints (under review, under construction, ...).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Extended abstracts.
Comment added March 20, 2025: An extended version is in preparation for both [E1] and [E2].
Comment added Oct 25, 2025: An extended version of [E2] is under review.
[E2] On Preorders of Path-complete Lyapunov Functions Through Lifts
 Wouter Jongeneel and Raphaël M. Jungers
Wouter Jongeneel and Raphaël M. Jungers
Benelux Meeting on Systems and Control, p. 50, 2025.
link (book of abstracts)
[E1] On the Conley Index and Controllability
 Wouter Jongeneel
Wouter Jongeneel
Benelux Meeting on Systems and Control, p. 219, 2025.
link (book of abstracts)
Thesis.
[PhD] Stability: a search for structure
![]() Wouter Jongeneel
Wouter Jongeneel
PhD Thesis, Electrical Engineering, EPFL Jun. 2024, adviser Prof. Daniel Kuhn.
PDF, link (EPFL)
[MSc] Controlling the Unknown: A Game Theoretic Perspective
 Wouter Jongeneel
Wouter Jongeneel
MSc Thesis, Systems & Control, TU Delft Nov. 2019, adviser Prof. Peyman Mohajerin Esfahani.
link (TU Delft)
Other notes.
[n1] Stability via reverse I-projections, a symplectic perspective on the computation
Wouter Jongeneel
Technical note, 2022.
PDF